STM32定时器 编码器模式
在对无刷电机进行闭环控制时,需要外接编码器读取电机实时的位置、速度等信息。STM32的定时器提供了一个编码器模式,能读取编码器中AB相的上升沿和下降沿,提供编码器当前位置的相关信息。如果使用另一个定时器每隔一定周期溢出,产生溢出中断,便可以获得速度、加速度等信息。
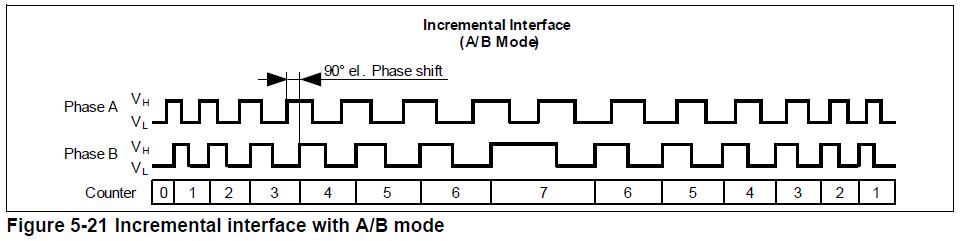
通过查阅芯片手册可以发现,A相和B相有90°的相位差。由图也易知A相信号在前表示正转,计数器自增;B相信号在前表示反转,计数器自减。因此可以HAL库提供的库函数__HAL_TIM_IS_TIM_COUNTING_DOWN来捕获计数器是否自减来判断电机的运动方向。
本文采用的编码器是TLE5012B-E1000,MCU为STM32F407。其他型号的编码器读取方式大同小异。
磁编码器介绍
以下部分摘录、翻译自 TLE5012B 用户手册
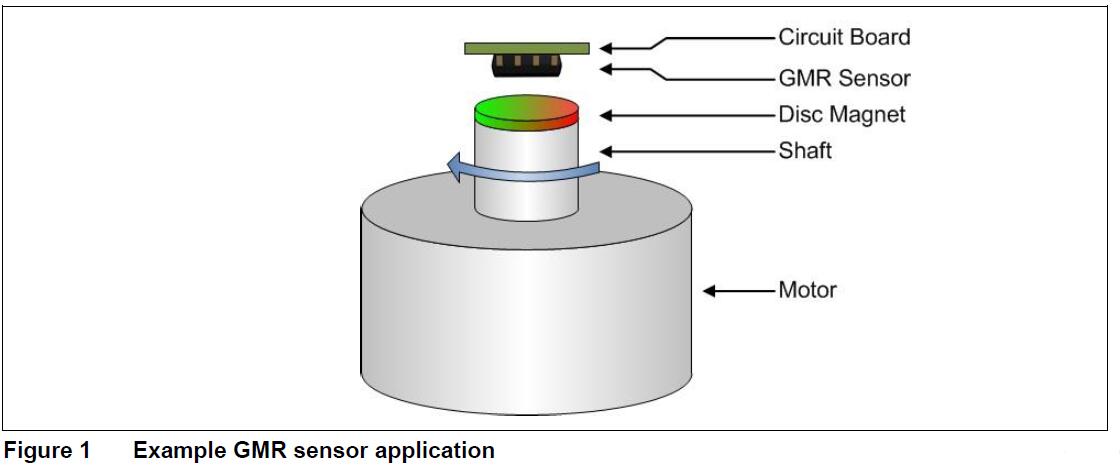
磁编码器的主要组成部分有:磁编码器芯片、径向充磁强磁。径向充磁强磁与输出轴同轴旋转,磁编码器传感器就位于强磁的垂直上方不远处。
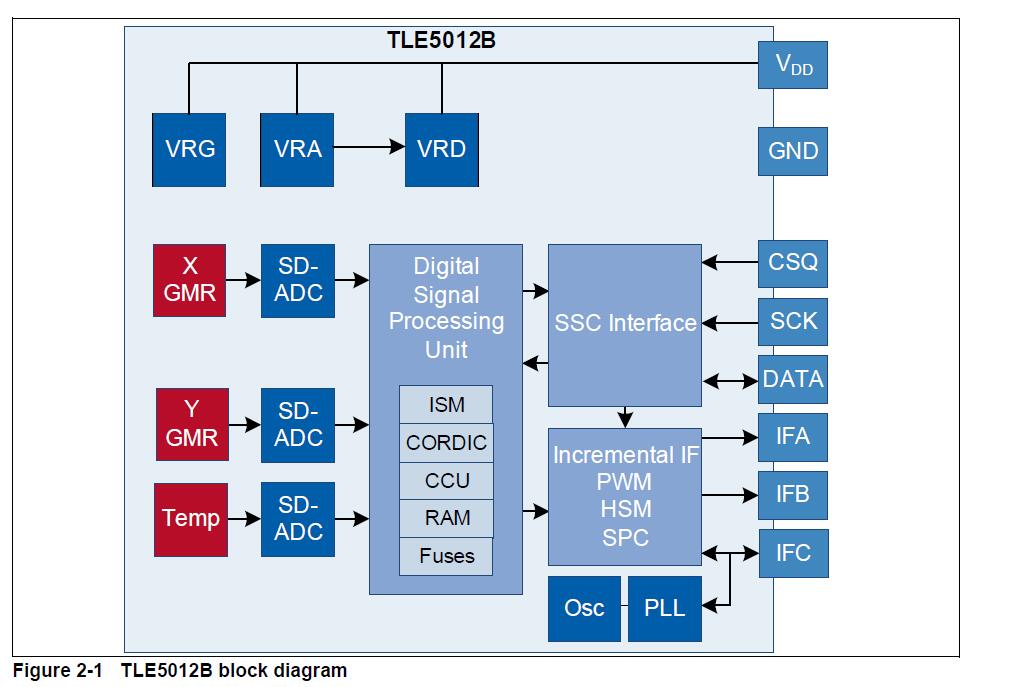
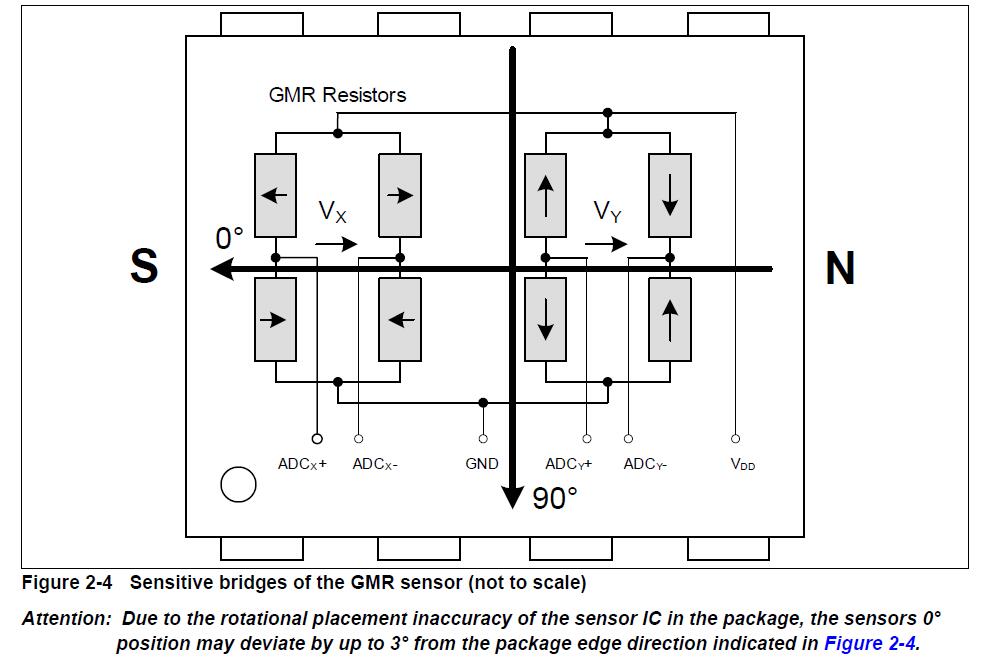
磁编码器芯片内部主要由这几部分组成:GMR巨磁阻/霍尔传感器、ADC模/数转换单元、数字信号处理单元、SSC 接口等。
磁编码器使用垂直整合集成在一起,这意味着,对GMR敏感的区域被集中在器件的逻辑部分上方,它们的电阻取决于磁场的方向的变化。
四个单独的GMR元件连接成一个惠斯通电桥。 这些GMR元件可感测所施加磁场的两个分量之一:
- X分量,Vx(余弦)
- Y分量,Vy(正弦)
采用这种全桥结构,可获得最大的GMR信号,并且抵消彼此的温度效应。
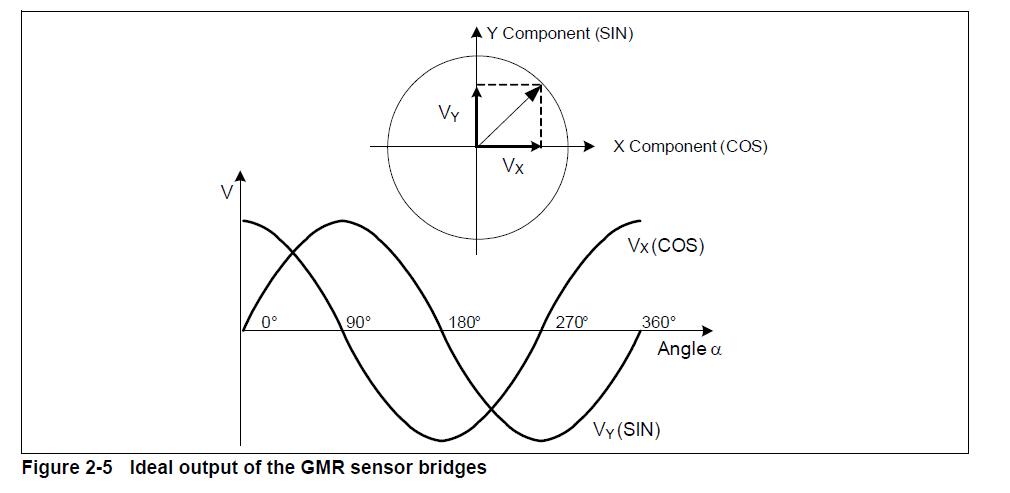
径向充磁磁铁在元件上方旋转,两组电桥便会产生相位相差90°的正弦波输出。之后ADC采样两个惠斯通电桥的输出,进行数字量化。
最后使用三角函数ARCTAN2,进行方位角运算,便可从传感器电桥的原始X和Y信号中,计算出真实的360°旋转角度值。
当 TLE5012B-E1000 的输出方式为ABI时,其默认分辨率为12位,即4096线/圈。

知道了编码器的各项信息,接下来就可以进行相关配置了。
STM32CubeMX配置
略过选择芯片、配置时钟频率、配置外设的过程,具体教程可以上网参考。
**需要注意的是在STM32F4中,只有高级控制定时器(TIM1, TIM8)和通用定时器(TIM2 到 TIM5)具有编码器接口模式。**下面以 TIM2 作演示。
-
打开 TIM2 的 Encoder 模式
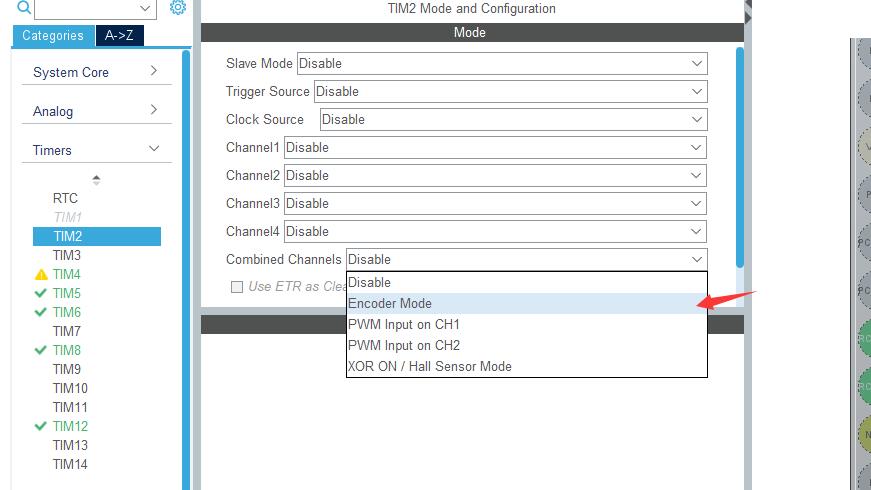
可以看到 TIM2 的 Channel 1 和 Channel 2 都变成了灰色无法选中,说明只有两个通道是支持编码器接口模式的。
-
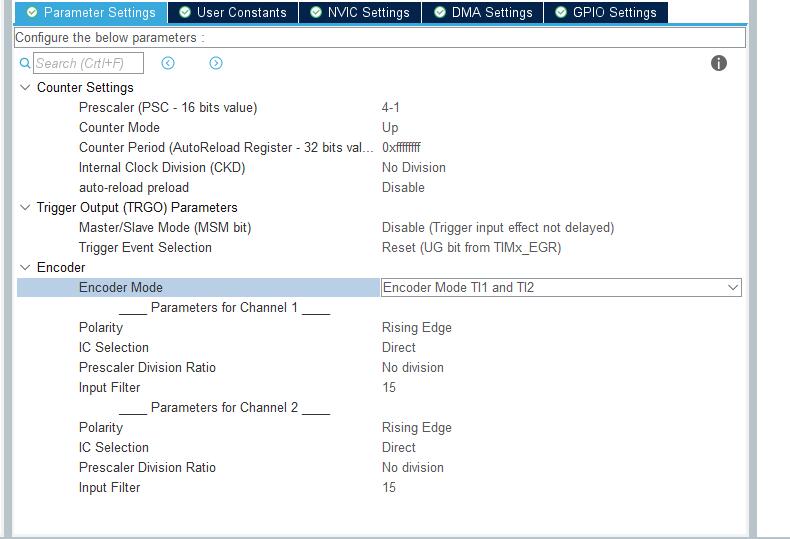
配置定时器的具体参数
-
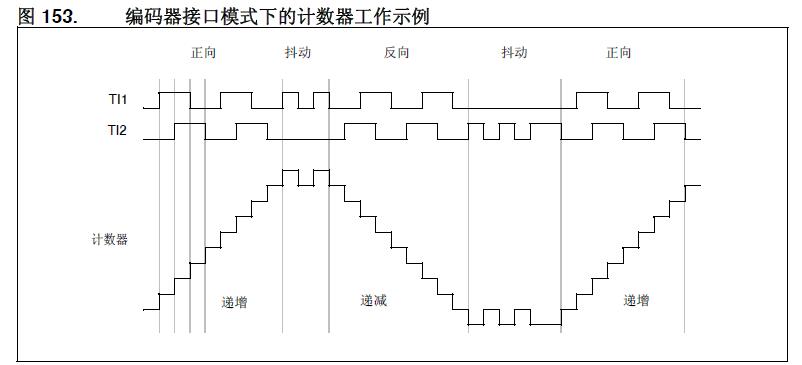
我们已经知道,编码器每圈会输出4096个脉冲(PPR (Pulse Per rotation))。由下图可知,如果仅在TI1处计数,定时器对于上升沿和下降沿都会计数,所以定时器每圈的计数值(CPR (Counts Per rotation))是 2 倍的 PPR。如果在 TI1, TI2 处均计数,CPR 则是 4 倍的 PPR。因此可以通过配置定时器分频使得 CPR = PPR。(非必须)

在此模式下,定时器就等同于具有方向选择的外部时钟,即计数器会从 0 到 ARR 之间连续计数(或从 ARR 递减到 0)。因此必须配置ARR的值,我们一般默认配置为0xFFFFFFFF (32 Bits)或 0xFFFF(16 Bits)。Input Filter滤波值是从1-15,看情况设定,是用来滤除一些杂波的。
代码编写
-
使能定时器编码器模式
在
tim.c��定时器 2 的初始化函数中,添加下面一行代码/* USER CODE BEGIN TIM2_Init 2 */
HAL_TIM_Encoder_Start(&htim2,TIM_CHANNEL_ALL); /** 使能定时器编码器模式 **/
/* USER CODE END TIM2_Init 2 */ -
获取计数值和运动方向
在程序中调用以下函数就可以获得当前时间下定时器的计数值(CPR)
__HAL_TIM_GET_COUNTER(&htim2);调用以下函数就可以获得当前时间下电机的运动方向
__HAL_TIM_IS_TIM_COUNTING_DOWN(&htim2);
获取位置信息
我们知道了定时器每圈的计数值(CPR),通过下面公式,很容易得到当前电机真实角��度

其中,Angle为真实角度,Pulse是当前的脉冲计数值,CPR为单圈总脉冲数。
获取速度信息
通过M法可以测量速度信息,公式如下:

其中,T0是自行设定的时间,M0是在设定时间内的脉冲数,C是单圈总脉冲数(CPR),n为单位时间内转速。
为了实现精准的周期控制,可以使用一个定时器专门用于定时溢出,在溢出回调函数中对编码器的计数值进行捕获操作。
-
配置计时用定时器
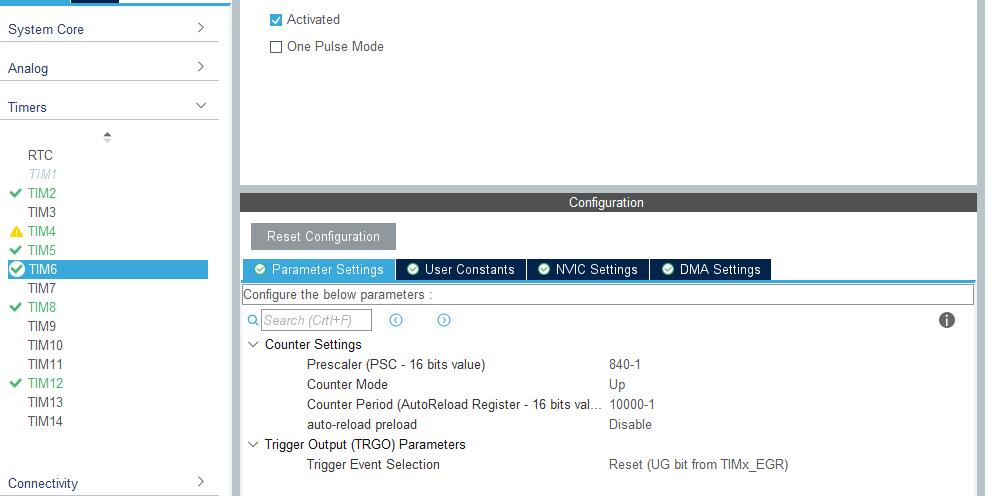
TIM6 挂载在 APB2 总线上,总线频率是 82MHz,通过配置分频和ARR,将溢出周期配置为0.1s。
-
编写代码
在
HAL_TIM_PeriodElapsedCallback回调函数中,加入回调函数/* USER CODE BEGIN Callback 1 */
else if (htim->Instance == TIM6)
{
Tim_Elasped_Encoder_Capture();
}
/* USER CODE END Callback 1 */Tim_Elasped_Encoder_Capture的函数代码如下:/** 下面代码是读取了三个编码器,根据自己需求删除部分代码即可 **/
void Tim_Elasped_Encoder_Capture(void)
{
for (int i = 0; i < 3; ++i)
{
encoder_AS5047P[i].capture_last_count = encoder_AS5047P[i].capture_count;
}
/** 捕获编码器的当前步数 **/
encoder_AS5047P[0].capture_count = __HAL_TIM_GET_COUNTER(&htim2);
encoder_AS5047P[1].capture_count = __HAL_TIM_GET_COUNTER(&htim5);
encoder_AS5047P[2].capture_count = __HAL_TIM_GET_COUNTER(&htim8);
/** 捕获电机运动方向 **/
encoder_AS5047P[0].direction = __HAL_TIM_IS_TIM_COUNTING_DOWN(&htim2);
encoder_AS5047P[1].direction = __HAL_TIM_IS_TIM_COUNTING_DOWN(&htim5);
encoder_AS5047P[2].direction = __HAL_TIM_IS_TIM_COUNTING_DOWN(&htim8);
HAL_GPIO_TogglePin(LED_2_PORT,LED_2_PIN);
/** 计算转速 **/
for (int i = 0; i < 3; ++i)
{
encoder_AS5047P[i].error_capture = encoder_AS5047P[i].capture_count - encoder_AS5047P[i].capture_last_count;
}
for (int i = 0; i < 3; ++i)
{
encoder_AS5047P[i].barrel_velCtrl.rpm = encoder_AS5047P[i].error_capture * 60 / 409.6f; //4096 * 0.1
}
}
通过以上代码,可以读取到电机的实时转速。